After analyzing all the multiple ways , the most adecuated to our case was chosen . We decided to use line following sensors to follow the course and autonomously navigate the correct path.
So we decided to design a pcb with eight TCR5000 sensors forming an arc and four disconnected LEDs with support function. We incluyed an Arduino nano CH340 connected to Raspberry Pi 3 model B+ and the infrared sensors.
On a sunny day in December, we did the first tests of the line following. We start printing the course onto vinilic canvas and later started finded the rout.

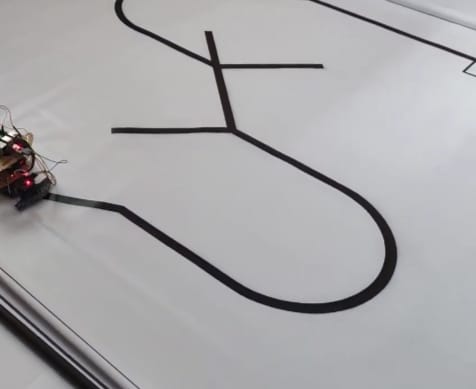
After traveling the route about 5 times, we encountered some difficulties with the size of the robot as it failed to recognize the curves of the road.
Finally we decided to do a last revision to the code and redesign the line sensor!!
Soon we will bring more news of our progress :))
